管廊、电煤栈桥等闭塞空间存在易燃易爆、有毒有害、高温及高粉尘的复杂环境。稍有不慎就可能引发严重的安全事故,这使得巡检工作成为必不可少的一项任务。

然而,传统的人工巡检方式不仅效率低下,还存在安全风险高、易漏检误检等问题。为了解决这些难题,旗晟B1-111-A型双圆管挂轨式巡检机器人应运而生,以其独特的设计、强大的功能和便捷的操作,为巡检工作带来了革命性的变化。
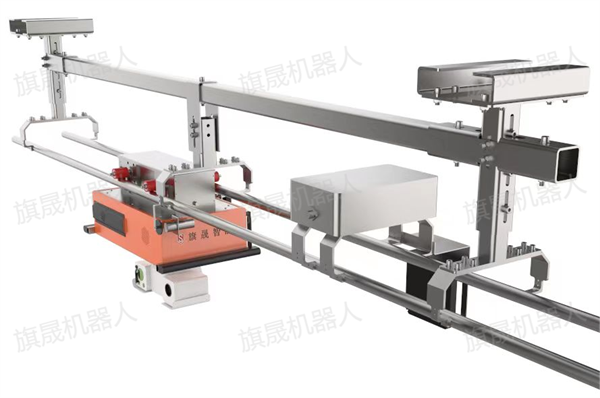
一、双圆管设计,适应狭窄环境
B1-111-A型巡检机器人采用业内领先双圆管轨道形式,这种设计使其能够轻松适应管廊、输煤栈桥等通道狭窄、高粉尘的复杂环境。小巧的外观不仅便于部署,还减少了对现场空间的占用,使得巡检工作更加灵活高效。
二、智能导航,精准定位
机器人搭载了编码器+RFID导航系统,这一组合确保了机器人在全场景下的无死角巡逻检查。通过高精度的定位技术,机器人能够准确到达指定位置,执行巡检任务,大大降低了漏检和误检的可能性。同时,这一系统还具备强大的抗干扰能力,即使在恶劣环境下也能保持稳定的运行状态。
三、实时监测,预警及时
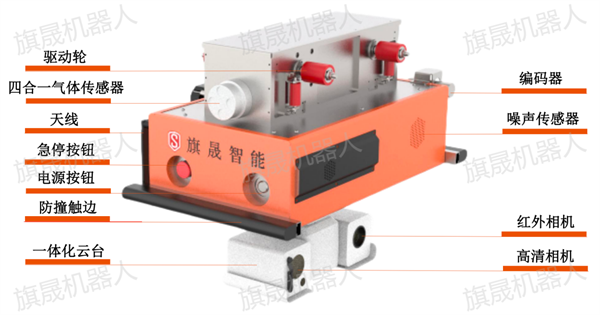
B1-111-A型巡检机器人配备了多种传感器和监测设备,包括气体传感器、噪声传感器、红外相机和高清相机等。这些设备能够实时监测环境参数和异常情况,一旦发现潜在问题,机器人将立即发出警报,并通过巡检管理系统将相关信息传输给控制中心。这种实时监测和预警机制,使得管理人员能够迅速响应,采取有效措施,避免事故的发生。
四、高效管理,远程操控
机器人配备的巡检管理系统实现了巡检工作的自动化和智能化。通过该系统,管理人员可以方便地安排巡检任务、查询历史记录、管理用户信息等。同时,远程控制功能使得管理人员可以随时随地掌握机器人的工作状态,轻松进行调度和指挥。这种高效的管理方式不仅提高了巡检工作的效率,还降低了人工成本和安全风险。

五、自主充电,续航长
为了满足长时间巡检的需求,B1-111-A型巡检机器人采用了分布式无线充电和手动充电两种充电方式。这种设计不仅保证了机器人的持续续航能力,还体现了绿色环保的理念。在巡检过程中,机器人可以根据需要自动返回充电桩进行充电,无需人工干预,大大提高了巡检工作的连续性和稳定性。

B1-111-A型双圆管挂轨式巡检机器人以其独特的设计、智能的导航、实时的监测、高效的管理和绿色环保的充电方式,成为了狭窄,复杂环境巡检工作领域的新宠。不仅解决了传统巡检方式存在的问题,还推动了巡检工作的智能化和自动化进程。相信在未来的发展中,B1-111-A型巡检机器人将发挥更加重要的作用,为工业与基础设施的安全运行保驾护航。
渠道合作、投融资合作请联系qsai_robot@qishengrobot.com